Hi, my name is
Engineering Portfolio



Hi, my name is
Engineering Portfolio
I'm a Computer Science and Economics student at Brown University excited about integrating AI processes for medtech applications. I have a background in competitive robotics and can nerd out about the robotics and computer building. I love building systems that leverage new technologies to solve real problems and create impactful products.
My experience spans full-stack development, machine learning research, and hardware engineering. Currently, I'm working with Professor Rafael La Porta on using LLMs to extract analysis from analyst reports to build financial models, while also developing various personal projects like web apps, video games, and MedTech solutions!
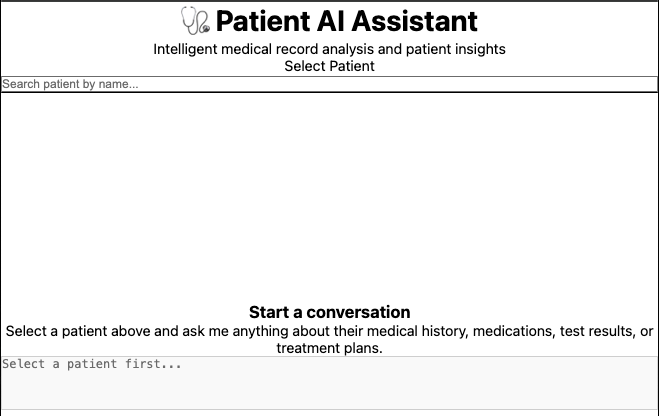
HIPAA-compliant ChatGPT-style assistant for streamlined patient data access. Integrated LLaMA model with FastAPI backend and OAuth2 authentication for real-time clinical information summarization.
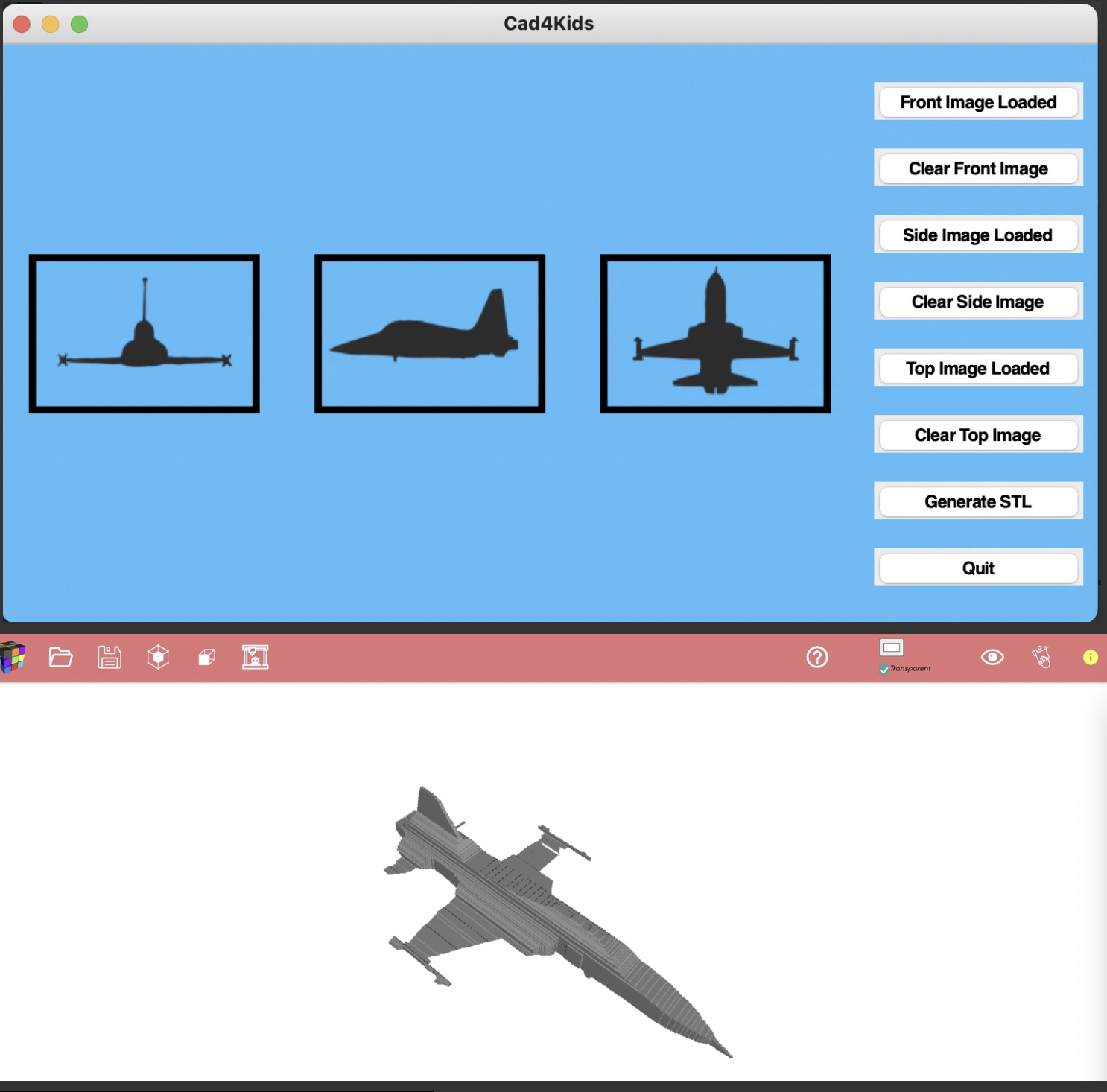
GUI application converting 2D images into interactive 3D models exportable as STL files. Optimized rendering with vectorized NumPy operations for improved performance and memory efficiency.
Founded and led globally competitive robotics team to regional championship. Implemented PID control and odometry-based motion planning for autonomous navigation, placing in top 0.3% globally.
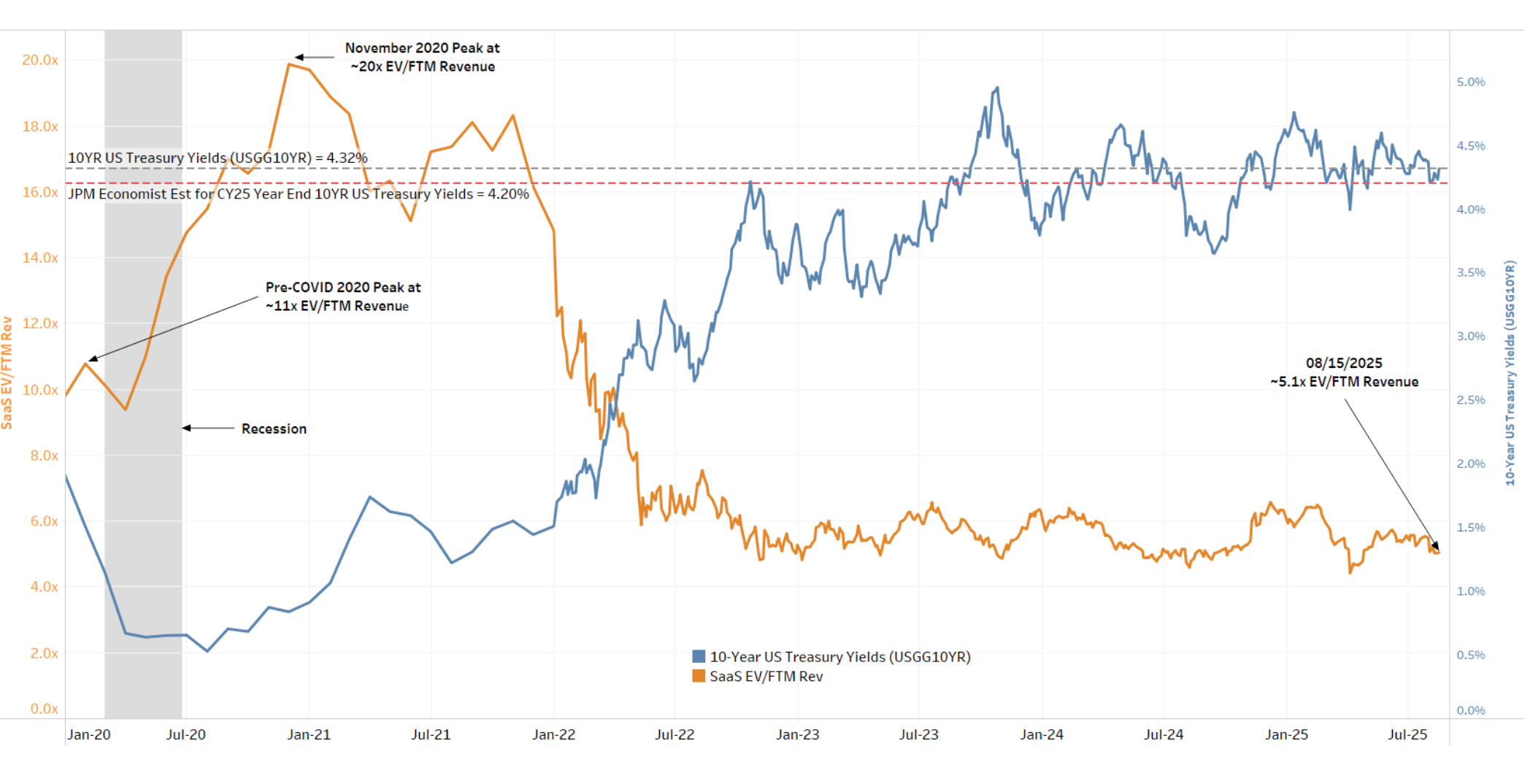
Research project extracting and structuring data from 120,000+ analyst reports using Llama 3.1 and FinBERT. Analyzing left-tail market expectations from Morgan Stanley and JP Morgan forecasts.
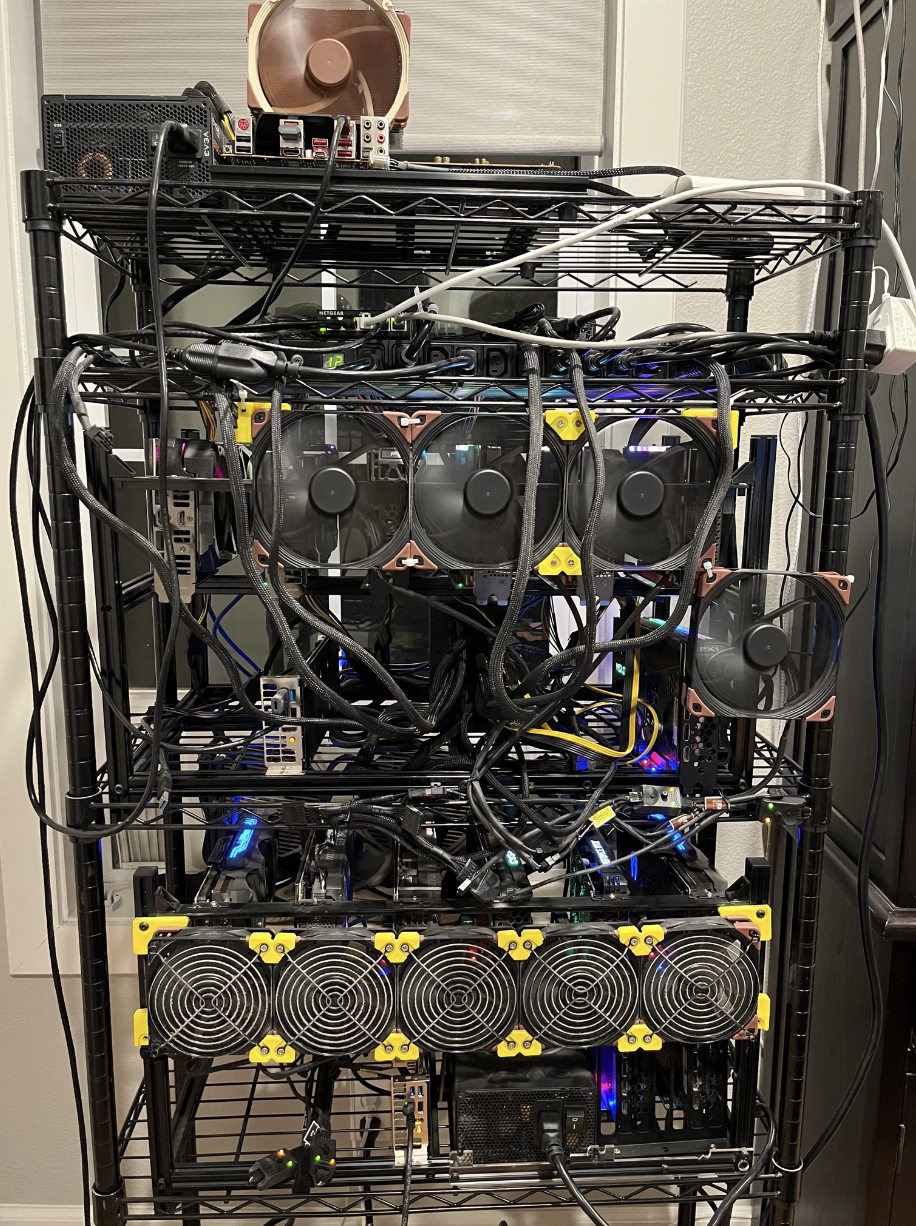
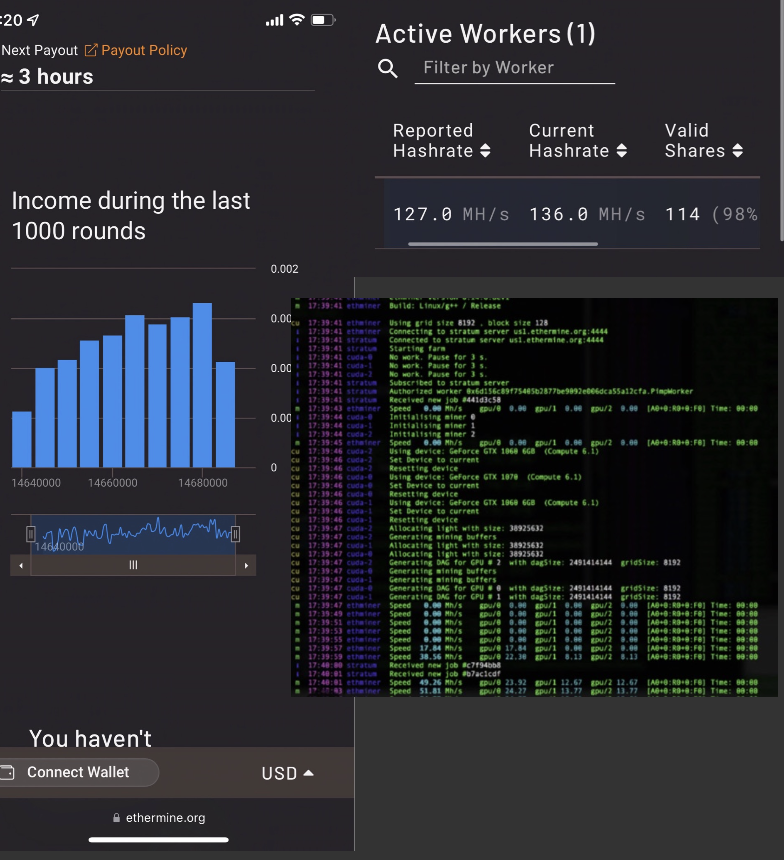
Engineered and optimized mining computers achieving 150 MH/s from RTX 30 Series. Invested $7,000 to generate $25,000 profit, reinvested in diversified portfolio including ETFs and index funds.
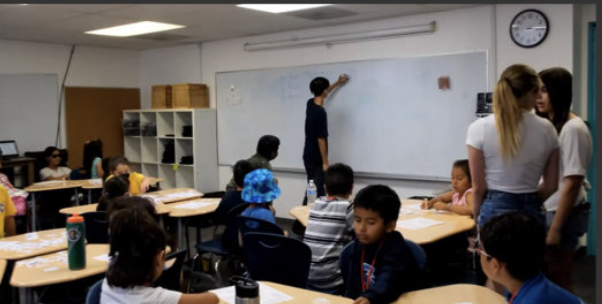
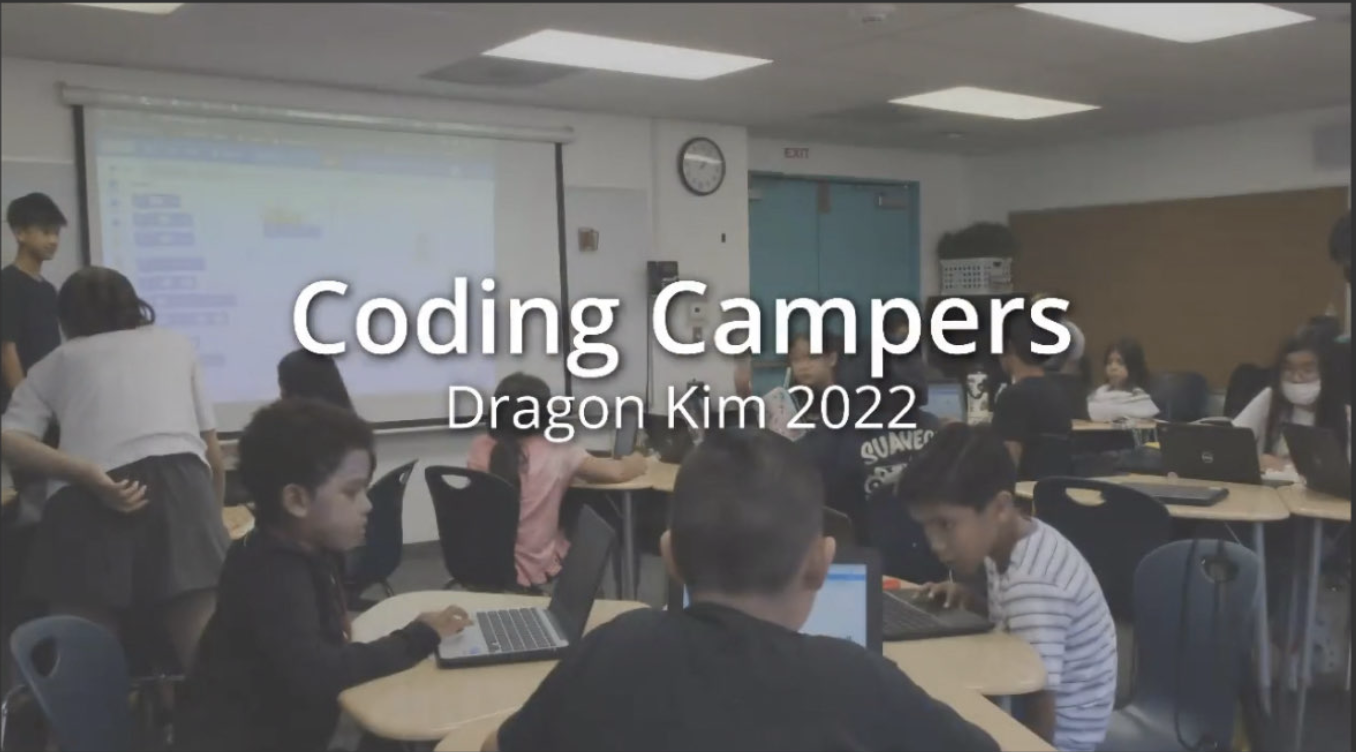
Dragon Kim Foundation Grant winner ($5,000). Provided free coding education to elementary and middle school students, teaching Python, Scratch, and binary concepts through interactive workshops.
Promoted from developer to PM; leading 10+ developers and designers to build full-stack web apps for clients. Coordinating design and engineering workflows in Figma/Git and Next.js/React, managing full product lifecycle. Implemented a CMS with Cosmic enabling client writers to publish, tag, and organize multimedia content.
Deployed Llama and FinBERT pipelines on Brown's CCV cluster to extract data from 120,000+ analyst reports. Automated preprocessing with Selenium and PyMuPDF, reducing data scraping and cleaning time by 85%. Developed STATA scripts for regression analysis on market expectations and built Python matching scripts to link IBES analyst IDs to Refinitiv codes.
Improved rendering speed of 2D to 3D array transformation by 40% with optimized MATLAB/Python algorithms. Built an interactive GUI with OpenGL providing advanced CAD tool accessibility and STL visualization. Collaborated with graduate researchers using Agile workflows and weekly standups.
Founded and scaled a VEX robotics team to top 0.3% globally, recruiting 8 members and securing $7,000 in funding. Programmed PID control and odometry motion planning, achieving 2.1x autonomous speed and reducing error by 60%. Won regional championship and OCSA Programming Award.